+ T" m# g% n) T/ ?* \0 k. I8 u/ P/ l- N UUV发射潜空导弹的问题探究
5 U! V* O& S& l( x 人工智能技术与咨询 2022-08-11 19:00 发表于河北
9 W/ @7 Y1 i0 n7 t, a6 D, h 源自:现代防御技术 作者:蒋文民 冯林平 屈亮 # _% @& W s$ r, h. e- ~+ d1 Q
摘要
$ _# ~, X- ]# d7 A" u" W3 @ 潜艇面对空中反潜威胁时,一直处于被压制的“非对称”态势。随着空中反潜力量的日趋完善,潜艇的防空压力越来越大。立足有效反制空中反潜兵力对潜艇带来的巨大威胁,通过对潜、空兵力平台作战性能的对比分析,借鉴水下无人潜航器(underwater unmanned vehicle,UUV)发射鱼雷的成熟经验,引入利用UUV发射潜空导弹的概念,分析了UUV发射潜空导弹的优势,同时对UUV发射潜空导弹的技术基础和技术难点进行了可行性分析。 8 ^8 t7 C3 L/ D: Z9 O5 w
关键词
t. _1 h' u/ x4 U: `! k$ Q 潜空导弹 ; 水下无人潜航器 ; 非对称 ; 反潜 ; 防空 ; 协同 - N7 h1 o, G0 ~: w
引 言 $ f. w3 M8 {) e& K3 m! C% G
潜艇水下作战最突出的特性就是它的隐蔽性好、攻击力强,然而,潜艇一旦暴露位置,无论是在水下还是水上都面临着严重的威胁。按照不同的威胁平台,潜艇的威胁主要来自潜艇、水面舰艇以及反潜飞机和直升机。其中,潜艇面对空中威胁时,其生存概率最低。长期以来,由于缺少基本对空攻击手段,潜艇在遭遇反潜飞机时,只能靠紧急下潜和机动规避来摆脱飞机的搜索跟踪[1],在潜艇与空中反潜飞机的对抗中,据称其生存概率在30%以下[2]。 ; r* J0 d" i7 u) U! o
1、 研究现状
+ X' g) L; @5 l2 f% Q 为了有效解决潜艇的防空问题,自从20世纪70年代以来,美国、俄罗斯、英国、法国、德国和挪威等国家相继进行了潜空导弹武器系统的研制,主要包括英国的“斯拉姆”(SLAM)潜空导弹,美国的“西埃姆”(SIAM)潜空导弹,法德意联合研制的“独眼巨人”潜空导弹,德国和挪威联合研制的IDAS导弹,法国的潜射“米卡”导弹,以及美国的潜射防空“海蛇”导弹[3],具体性能情况详见表1。 5 S2 ^* j" l" f- p) S; k" ~( p
8 W& e9 k1 I3 W. c3 B1 J 表1 世界各国潜空导弹性能对比
3 M: U0 X' Q, g7 c Table 1 Performance comparison of submarine-to-air missiles in various countries
8 g1 X9 L* q U Q2 | 由于潜空导弹存在发射时容易暴露潜艇位置以及对空探测能力弱等问题,一直以来,潜空导弹的发展备受争议,研制进度缓慢。随着网络中心战的提出,潜艇需要考虑的威胁因素越来越多,面临的防空手段选择也越来越多,例如采取多武器平台进行协同防空,可以有效减轻潜艇的防空压力。但是,当潜艇单独执行任务时,防空的问题始终得不到很好的解决,考虑到潜艇发射容易暴露位置和对空探测能力弱的问题,如何有效解决潜艇水下防空问题成为当前的热点问题。
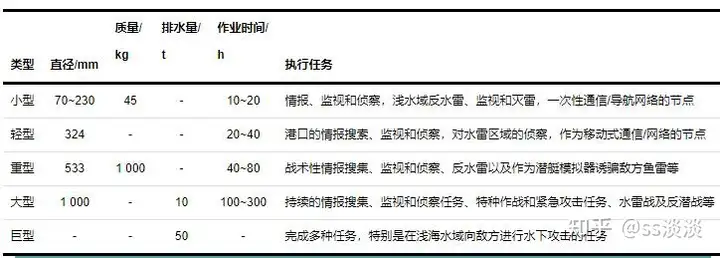
- C& F7 b6 J8 W3 I 水下无人航行器(unmanned undersea vehicle,UUV)作为一种海上力量倍增器,有着广泛而重要的军事用途,在海战中有不可替代的作用[4]。UUV能够用来执行扫雷、侦察、情报搜集、海洋探测以及水下攻击等任务,美国海军曾提出5种不同大小型号的UUV,详见表2。UUV作为武器搭载平台,目前提出的研究方向主要是携带鱼雷及水雷进行攻击,在搭载导弹特别是防空导弹执行作战任务方面研究极少。如果UUV能够有效代替潜艇发射潜空导弹,并进行空中探测,潜艇的生存概率将大幅度提高,且其应对空中威胁的手段也更加多样,而UUV能否有效代替潜艇执行潜空导弹发射和空中探测任务的影响因素是多种多样的[5]。
8 r h k; ~: |- F" a9 ^
. ^9 L: ]: I0 V- m i1 u& e 表2 美国海军提出的五种型号UUV
' C$ s% u% N4 f! H, J" c3 H* K Table 2 Five models of UUV proposed by the U.S. Navy
, Z' z2 l7 ?& I2 |& d 2、 潜、空平台作战能力对比分析
* ?1 i- }7 R: C 2.1 反潜飞机平台作战性能 + w- e+ B: J) d1 u3 H
(1) 速度方面。反潜飞机速度范围一般在250~850 km/h,每小时可搜索1 500 km2[6],搜索范围大、速度快。
# z& M5 X& H" f; p. n# `' h (2) 探测方式方面。反潜飞机探测手段丰富,对潜艇的探测包括目视、雷达、声纳、磁探仪等多种手段,探测能力较强。
- E" v5 ]5 C% Z8 [9 Q7 M4 ?7 k (3) 协同作战方面。由于反潜飞机通信手段的多样化,使得其在作战中同其他作战力量进行协同作战更为便利。
; |. n) u8 @! z' I (4) 武器作战效能方面。反潜飞机可供选择的作战武器多样,有鱼雷、深水炸弹、火箭弹及反潜导弹等,其武器威力大,可靠性高,整体作战效能较高。
% |: |; ~; D- S, |, j2 \' Y: l, z 2.2 潜艇平台作战性能
8 y, @" L1 B7 O; m: G7 t; c, K (1) 速度方面。目前潜艇的水下航行速度一般不超过35 kn,其经济航速和通气管状态航速更是要低的多。 $ T2 z: w, [2 H+ l
(2) 探测方式方面。潜艇对空探测,在水面和潜望状态时通常只有被动雷达、潜望镜等,在水下时更多只能靠声纳侦察来的接收信号获取大致的空中信息,对空探测能力差[7]。
. Q9 O) N! K; c/ y& e0 ` (3) 协同作战方面。由于潜艇隐蔽性要求对其通信方式选择上的限制,潜艇在平台间的通信实现上较为困难,协同作战难度较大。
0 N$ S: _7 U2 K4 A+ t (4) 武器作战效能方面。潜艇对空作战武器单一,目前只有潜空导弹,且其技术发展不成熟,缺少实战经验。
( F/ `) O" R, G' j! x8 x6 a 2.3 潜空平台对抗性能比对
$ R6 x6 D: O% Y5 E! P" N% y 通过对以上潜空平台作战性能的总结描述,可以把反潜飞机与潜艇的相关性能进行比对分析。 1 j) Z3 Q0 Y4 B- B' \& x
1、 反潜飞机的速度可以达到潜艇速度的几倍甚至几十倍,速度上占有巨大的优势。
( f6 m7 S# {. m. [5 X4 {" g5 ] 2、反潜飞机探测方式比潜艇更为丰富,作战应用更为灵活多样。
/ s* h0 l2 `+ A; W* G5 _ 3、反潜飞机由于通信方式上优势使得其协同作战能力比潜艇更强。 y) Z& s$ C3 g: M- T! T7 L
4、反潜飞机相比潜艇而言,作战武器选择更多,武器作战效能更好。 7 H" F; e0 W; A0 G/ c @ Z, Z0 i
虽然,反潜飞机相对潜艇占有很大优势,但在实际作战中潜艇也有其自身的优势,比如: 4 z! H& X# ~2 y# i+ |* X; V
1、潜艇的隐蔽性较好。在战场环境中,潜艇可以通过潜深进行隐蔽,通常在不进行主动通信的情况下很难被发现。
( C! L- A% X; W7 Y# c4 J" m 2、潜艇的环境适应性更好。飞机在面对复杂天气和恶劣环境时,适应性很低;相比之下,潜艇对复杂海洋环境的适应性要好很多。
& @! j& ~& [ }% @; x8 N 3、潜艇的续航力比飞机要好。潜艇的续航力是飞机续航力的几十甚至上百倍。
- {/ d. U2 D8 J4 G f$ s 通过性能比对分析,可以看出潜艇水下防空面临的空中目标探测和目标打击能力薄弱的问题较突出,且目前缺少有效的解决措施,使得反潜飞机在性能上比潜艇占有明显的优势,因而在反潜作战中形成了“非对称”的优势。
9 ?' a+ y, @1 L+ s4 G 3、利用UUV平台发射潜空导弹优劣势探讨 + s% H' l% p8 R2 m4 ]3 R1 V
目前,UUV在作战使用方面的研究已经成为热点,其具有目标小、续航力长、可回收、机动灵活,功能多样化的优点,且潜艇通过布放UUV作战减少了自身被发现的概率,可以有效执行侦察探测、远程打击、潜艇防御和水下网络作战等多方面任务,若能够实现UUV搭载潜空导弹进行有效作战将会极大提升潜艇的防空作战能力,减轻潜艇空中威胁[8]。 + @ C. Q: o6 Z; ?
3.1 UUV发射潜空导弹的优势 - h! ?% h% x5 L3 p
(1) UUV发射导弹可以提高潜艇的生存能力,潜艇受到空中威胁时,可提前预置UUV,在其携弹航行到距离潜艇安全距离之外时,进行远程控制UUV发射潜空导弹,或者在多UUV参战的情况下,利用UUV进行中继通信,可以实现更远距离的发射控制,有效避免了潜艇暴露自身位置的问题[9]。 $ D0 F: h0 D0 o; s1 A; w$ y
(2) UUV发射导弹可以充分发挥导弹的探测能力,目前,潜艇对空探测能力比较薄弱,发现并锁定目标比较困难,导致潜空导弹的有效打击能力弱,而UUV具有发射后可回收的特点,使UUV搭载潜空导弹水下航行可以实现导弹目标探测、锁定和跟踪的效果,即便过程中丢失目标也可以利用UUV可回收的特性避免导弹的消耗,使导弹得到更为有效的利用[10]。
" d1 m# k; [, n. {$ r" ? (3) UUV发射导弹被发现概率更小,相比潜艇而言,UUV的噪声要小的多,其携带导弹抵近搜索打击成功率更高,且不易被反潜飞机发现。 6 q2 n1 b+ q* g, O; S
(4) UUV发射导弹能实现对空协同作战,可以实现多个UUV协同作战或者潜艇与UUV之间的协同作战,实现不同平台间空中探测与打击的配合或者多枚导弹的协同打击,对空打击的能力将会显著提升,将会进一步缩小潜空力量对比差距。
4 A; h; Q& `% W% R' j (5) UUV发射导弹被打击的成本代价低,UUV作为无人潜航搭载平台,即便被摧毁,损失成本将比潜艇小的多。另外,UUV代替潜艇被摧毁可以避免人员伤亡,最大程度上改善潜空对抗“非对称”的差距,潜艇主动进行空中打击和防空反击作战的能力将会大幅度提高。
' D$ f* X, U) Z" s* B (6) UUV发射导弹还可以有效解决防空导弹射程不足的问题,UUV自身续航能力较强,如美国的LMRS型UUV最长可以续航40 h,UUV携弹发射可以有效解决目前潜空导弹射程不足的问题。 ' ] C8 T' {! c: u+ p3 {
3.2 UUV发射潜空导弹的劣势
9 H0 Z Z5 i+ V. |( J 尽管,UUV发射潜空导弹有很多天然的优势,但在现有的技术条件下,其在作战中仍然存在很多的缺陷和技术不足[11]:
: W9 X/ |$ `1 T 1、由于UUV自身体积、质量和动力的限制,潜空导弹的尺寸、质量等参数也将受到影响,对导弹以后的发展及作战使用、效能发挥都存在一定的影响[12]。 6 m8 |+ w5 w- z
2、由UUV(特别是潜艇携带的UUV)发射潜空导弹,其攻击准备时间更长,通常需要提前掌握反潜飞机的动态信息,提前进行战斗准备,在紧急情况下进行空中反击,使用UUV发射导弹可能会错过最佳攻击时机。
- x h. }( Z5 c3 V 3、UUV携带潜空导弹会增大其自身的重力,对其动力的要求更高,且对UUV和潜艇的速度以及机动性都会造成影响[13]。 $ i4 x5 e+ \% g$ d" T" B
3.3 利用UUV发射潜空导弹的预期 ) \" e# d: K: O: E' ~ L+ P/ m
通过以上对UUV发射潜空导弹的优势和劣势进行分析,可以看出,利用UUV发射潜空导弹可以有效缓解潜艇面临的防空压力,在未来作战体系中具有较大的研究价值,虽然目前阶段的研究较少,基础较为薄弱,还有很多尚未解决的技术难题,但随着UUV自航发射技术、能源动力技术、探测和通信技术以及布放回收技术等技术的进步,利用UUV进行潜空导弹发射势必会得到足够的重视和利用。 9 g1 [! u( v& z& W7 s* Q+ _
4、UUV发射潜空导弹的可行性分析
+ r" s7 Y; C# `: d 目前使用UUV平台发射武器的研究主要集中在发射鱼雷和布设水雷方面,且技术成熟度不高,并无公开装备的具体型号可以借鉴参考。而利用UUV平台发射潜空导弹武器的研究则鲜有报道,可见使用水下无人作战平台发射导弹武器还存在许多技术和使用领域的问题需要解决。然而,“波塞冬”核动力无人潜航器的成功,使UUV发射潜空导弹具备了一定的技术储备和作战运用基础。 ( R: J: R7 I* z
4.1 UUV发射潜空导弹的技术基础 & W$ g+ a; k% X1 V$ O2 E6 ?
(1) 尺寸匹配方面。目前典型的潜空导弹直径范围为76~200 mm,UUV类型划分标准不一,以美军划分为例,UUV按体积大小可分为小型、轻型、重型、大型、巨型[14],直径最小的70 mm,最大可达1 000 mm以上,主流的UUV直径多在533 mm以内,理论上可以满足搭载潜空导弹的尺寸要求。 # P% \. Y+ r: @. [' f
(2) 动力方面。文献[15]通过仿真验证了UUV携带并发射重型鱼雷的可行性,而目前典型的潜空导弹质量范围在11~120 kg,其质量是重型鱼雷的十几分之一,可见,UUV在动力上可以满足对潜空导弹的携带,并且随着“波塞冬”的研制成功,UUV的动力问题将得到更好的解决。
w9 i( R* q9 k# i6 }1 Y (3) 发射过程实现方面。UUV自身体积小、质量小,在武器发射的过程中,自身运动状态会受到导弹运动的干扰。为了探讨UUV发射导弹的可行性,借鉴UUV发射重型鱼雷的仿真,文献[15]通过FLUENT软件对重型鱼雷从启动到脱离发射导轨时间段UUV的运动过程进行仿真,验证了UUV自航发射鱼雷的可行性。分析鱼雷的发射过程仿真,对UUV发射潜空导弹具有很强的理论基础和实现性[16]。 + V, u1 o! {) R( C1 [/ \' @) a+ ~% H
(4) 对UUV武器发射装置的设计方面。UUV携带潜空导弹首先要解决的是发射装置的设计和选型,目前,UUV发射武器是基于对鱼雷的研究,文献[17]分析了UUV对鱼雷发射装置的要求,介绍了现有的几种鱼雷发射装置并对比分析了各自的优缺点,设计出一套适合UUV的鱼雷发射装置。UUV的导弹发射装置需要综合考虑体积、质量、结构、控制、发射深度、发射准备时间、兼容性等方面,可以借鉴文献中设计的鱼雷发射装置。
3 i& v: U* g, x9 ] (5) UUV模块化设计方面。UUV的模块化设计和任务重构技术,有利于缩短产品研制周期,降低产品研制成本,提高产品技术性能与可靠性及维修性,更主要的是有利于产品更新换代,有利于根据不同功能、任务要求,迅速地进行重构。
4 T( p _; t1 R: `7 ^: D4 ` 4.2 UUV发射潜空导弹的技术难点与挑战 , L+ B0 j' I/ {9 Z; z' z( ~
(1) UUV水下通信技术方面。UUV作战时,需要相互或与母艇之间进行大量的指令和数据传输,这就对其通信能力提出了较高的要求。当前,UUV在水下通常靠光缆和水声进行数据传输,水下光缆成本高,使用不方便,而且不符合未来水下作战网络的要求,水声传输则速度较慢[18]。而作为发射导弹的武器平台,将会对UUV的通信能力提出更高的要求,UUV目前的水下通信能力将无法适应未来作战的需要。 * c5 [9 X9 y6 j5 r8 m
(2) UUV对空探测技术方面。UUV作为潜空导弹的发射平台,需要对空中目标具有一定的探测能力,能否快速准确发现空中目标是对空打击的关键;目前不管是潜艇还是UUV,对空中目标的探测能力都比较弱。
' w4 p) O* U- t4 O (3) 弹载惯导与UUV平台惯导的初始对准问题。不管是潜艇还是UUV,其发射导弹前都必须完成导弹与基准惯导平台的调平对准。由于惯导陀螺漂移产生的误差影响,目前,常规潜艇上装备的惯导平台定位精度仅能保证短时间内的导弹发射平台的定位精度和速度精度需求,特别是远海作战条件下,UUV在水下长时间隐蔽机动,惯导误差随时间积累越来越大,加上阵风、海浪、机械振动等对惯导系统的干扰[19],都会对初始对准造成较大地影响,极有可能造成导弹飞行误差过大或偏离航路等问题发生[20],这些问题对UUV发射潜空导弹同样是较大的挑战,惯导初始对准问题是必须要解决的关键技术难题。 * c6 A: d! \2 W O$ i4 {
(4) UUV无人化、智能化和自主作战的技术问题。UUV作为未来网络中心战水下的关键组成部分,要实现其无人化、智能化以及自主作战还存在诸多的技术挑战。首先精确定位、导航与授时(PNT)是影响UUV自主作战的关键前提,只有在精确的PNT条件下,自主平台才能正常运行,如何保持PNT精度和可用性成为普遍关注的问题。其次,防止发生服务中断也是需要考虑的问题,随着越来越多的自主系统投入战场,多入多出(MIMO)通信网络将成为一项关键技术,必须有效和高效利用带宽,以防出现服务中断[21]。此外,由于水声信道的复杂性和通信速率的限制,使得UUV必须具有自主执行目标检测和跟踪的智能化技术。目前,UUV自主检测器只能根据已设定好的程序对目标进行检测,但对复杂背景干扰的适应性差,能否找到一种自适应门限的设置方法,使背景噪声、干扰的随机性对系统检测性能的影响尽可能小成为解决问题的关键[22]。
" e" j, _7 `# S4 s; t 5 结束语 " [. p" y6 q$ I
随着最新科学技术研究成果在空中反潜作战上的不断应用,潜艇面临的空中威胁也日益加剧。发达国家在潜空导弹发展方面已经拥有一定的经验,我国的潜空导弹虽然还处于研究探讨阶段,但是具备相应的研发能力和改装移植能力。现阶段,UUV的发展速度迅猛,预计到2030年,美国将组建有2 000艘UUV的水下无人部队投入海军使用,试想未来一体化作战的背景下,水下的主要作战平台由潜艇转变成UUV,大量携带潜空导弹的UUV集群作战将具有强大的防空作战能力,那么未来水下防空问题的解决将大程度的依赖UUV发射潜空导弹来实现。 ! j" `1 K4 c6 S
6 i9 S( S/ u7 q% U7 X/ N6 Q8 s( ?9 m! L3 o1 i0 h
. W* I5 c D% x( T! z' T5 o8 W* H" X
$ A' g0 a9 M ?3 N
; k. @ K6 a% w s# h y8 D2 M |