|
4 k& l1 {9 d. U/ |1 x( {9 m) |
以下文章来源于博创测绘,作者专注技术服务的 3 l7 H6 @* \* z5 p5 v
01 天基测绘装备 空基测绘装备主要包括搭载平台、任务载荷及数据处理软件。搭载平台主要有:通用民航飞机、无人机、飞艇等。任务载荷主要有:光学相机、机载激光雷达、机载高光谱仪、红外仪等。数据处理软件主要有:摄影测量软件、激光雷达点云数据处理软件、高光谱遥感数据处理软件、测图软件等。9 ?( t# s; [# M* P
搭载平台 d' j1 \2 S5 B
主流无人机:
% C# I$ Y% `0 U7 Z- P- L2 ]! y/ t4 Y0 | 1、固定翼无人机:飞马F系列、eBee Geo……
* R+ y) p+ z4 }7 d 2、多旋翼无人机:大疆M系列、飞马D系列……
5 v; M( u! a7 \3 F* f" [& r 3、垂直起降固定翼无人机:纵横大鹏系列无人机、飞马机器人V系列……
* I9 I m0 {9 P5 H! ~2 |9 Q1 l 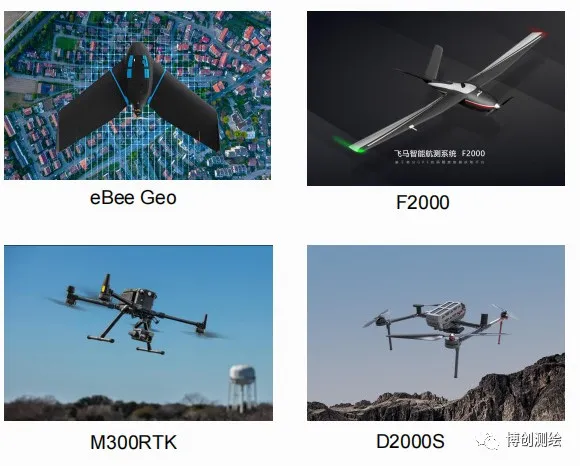
' h& H, v) z5 w6 _4 \9 c- |! U- ~5 u' s
任务载荷
& E1 e: h7 ~! T( X 机载航摄仪:
1 n2 x% q& L8 K7 O4 g1 F# ] 航空摄影机简称“航摄机”。装置在飞机或其他飞行器上可对地面摄影的仪器,是一种专用于在飞机或其他飞行器上向地面进行摄影的照相机。现在有单镜头、多镜头(倾斜相机)。
. L5 x9 _) c5 l, ` 国外:徕卡ADS100、微软UCE M3等; 5 a7 z0 }% _) E4 h* E$ t- v
国内:四维远见SWDC系列等
5 w) t; M0 q9 o/ i0 l: |& i+ ] 无人机机载相机:睿铂系列、赛尔系列、帝信系列等
3 w; K# o- a; j/ U7 ^ 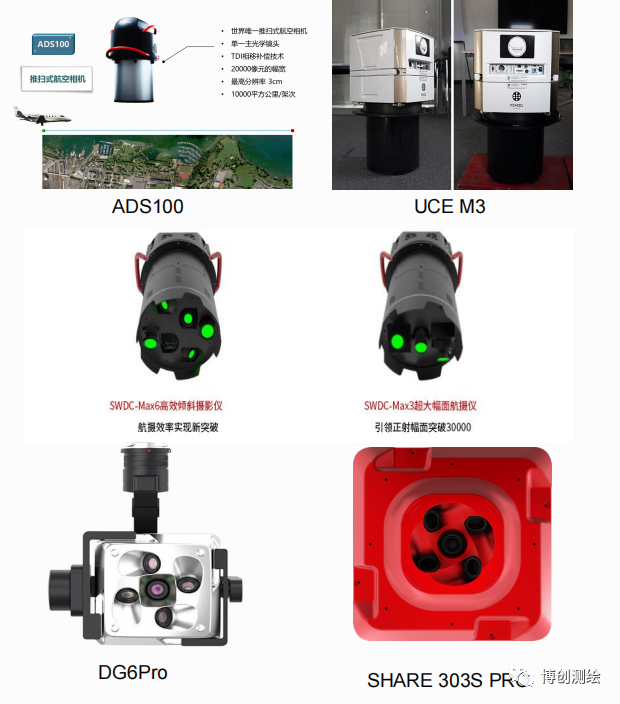
B$ L& k9 R$ d1 d6 ` 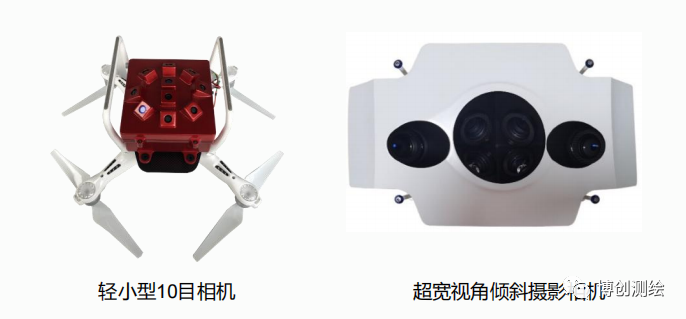
4 ]9 T; A9 q& K- [* o8 v
机载激光雷达:
2 u% D9 W. O; U- h2 y0 G. b8 g 机载LiDAR(Light Laser Detection and Ranging)是激光探测及测距系统的简称。它集成了GNSS、IMU、激光扫描仪、数码相机等设备。
9 z* m2 C0 C! e6 [$ N$ P 国外:Leica公司的TerrainMapper-2系统、Optech公司的ALTMS系统、Saab 公司的TopEye系统、Riegl公司的LMS-Q系列系统……。 6 P0 m6 t2 s5 q2 f, G: [8 O, q
国内:中海达PM系列、数字绿土LiAir系列、华测多平台激光雷达系统系列、大疆禅思L1系列……
^) w9 F/ A( d/ b3 P8 C" o8 x2 t 
. Y- B/ a; @# ^8 k6 E6 C2 H 高光谱仪:
5 w5 H7 o* n& B+ T9 G 高光谱遥感是高光谱分辨率遥感(HyperspectralRemote Sensing)的简称。它是在电磁波谱的可见光,近红外,中红外和热红外波段范围内,获取许多非常窄的光谱连续的影像数据的技术。其成像光谱仪可以收集到上百个非常窄的光谱波段信息,一般波段350nm-2500nm之间。高光谱遥感具有光谱分辨率高、波段范围窄、图谱合一、连续成像等特点,能够区分出地物光谱的细微差别,探测到其他宽波段遥感无法探测的信息。 ( A6 a7 |% E( I, Q2 Z

: r5 [5 x' {7 r4 H- c5 T
混合型航摄仪:
0 k N1 \- \3 t c3 [" ]( E# ]) | 以往提高三维模型效果,大都是依靠提高地面分辨率这一单一手段实现的,这种手段一方面严重降低了航摄数据采集效率,另一方面硬件采集设备也开始遇到技术瓶颈。近年来,轻小型机载Lidar的性价比开始提升,多源异构数据的采集将成为未来三维模型数据采集的发展方向,混合型航摄仪也应运而生。四维远见的SWDC-Mix混合型航摄仪、飞燕航空的AIMS航空集成多传感器航摄仪。
5 ]7 S7 c; b# u" e 
1 J7 M/ S; A" ~, A J
数据处理软件 , g5 f3 X, O6 ]1 q* `: @; t# s* p
数据处理软件主要有任务载荷的随机处理软件及第三方专业软件。
6 ?0 X$ L s" X6 P: k- i/ Q) Z 三维建模软件:Bentley ContextCapture Center、瞰景Smart3D2022、中测智绘Mirauge3D、大势智慧重建大师、四维远见JX5-AI3D智能三维建模、大疆智绘、Pix4Dmapper、Agisoft Metashape(photoScan)、SkylineGloe-photoMesh…… 5 X$ }! ]8 e4 ~5 d: |
三维测图软件:南方航测三维测图软件uFeature3D、南方CASS-3D、天际航DP-Mapper实景三维测图系统、迪奥普SV365……
6 p3 [4 M6 }$ h6 j0 Y) r 数据管理平台:超图SuperMap、中地MapGIS…… . G' U5 y$ w, |7 K8 W& @
02 地基测绘装备 ( i7 M: d8 Z% d s! U( |
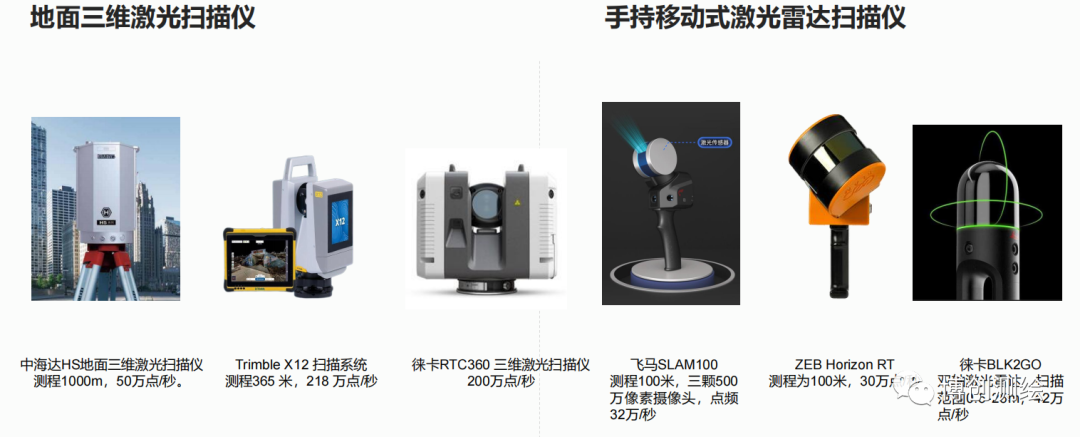
地基测绘装备主要是常规测绘设备,也包括部分特种测绘设备。包括:全站仪(测量机器人、扫描全站仪、陀螺全站仪)、GNSS接收机、高精度电子水准仪、地面三维扫描仪(手持移动式激光雷达扫描仪)、移动测量系统、轨道交通精密测量设备、地下空间探测设备等。 ' _; k% `/ J- `& Y t3 u% @

" f" k" T/ s$ s3 ? u

$ E$ ^1 E5 _/ T4 ?% b

& ^' V. m: q) Z* z5 @- F0 R8 J
- [) F/ h5 p; J: m& U" i3 F 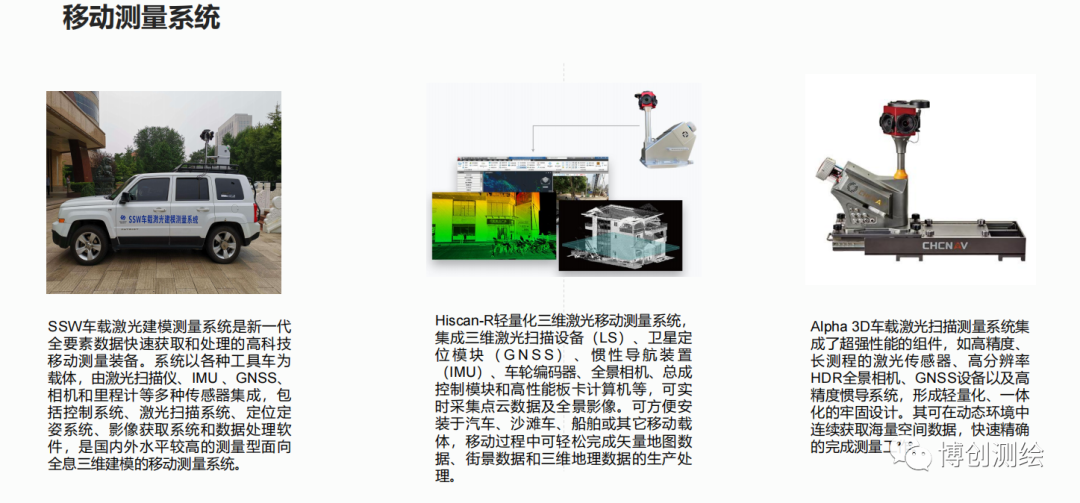
3 ~; A. {4 D8 U
轨道交通精密测量设备 # Q/ y7 t$ D" o) u. O9 k
线路布板软件、I型II型III型轨道板精调系统、I型II型III型轨道板模具及成品板检测系统、道岔精调系统、南方高铁轨道几何状态测量仪、MEASLLEY系列轨道几何状态测量仪、组合惯导动态轨道检测系统、南方相绝对一体铁路轨道检查仪、南方相对轨道检查仪、南方高铁轨道几何状态测量标架系统、南方高铁轨道检查仪检定平台、南方高铁轨道动力车等多种软硬件产品。
; S" U% X. ]" z& t* f2 [ 
, l, v5 G; _9 F% ~& T& ?. w+ } 
?$ W7 u! A4 W( N
03 海基测绘装备 5 L* _$ |4 q) ~: p
近年来,我国在海洋测绘装备的自主研发方面投入了较大人力和物力,在引进、消化和吸收国外先进技术的基础上,海洋测绘装备的国产化进程取得了重要进展,如单波束、多波束、侧扫声呐、海洋重力仪、海洋磁力仪、水声定位等设备已基本跟上国外先进设备的步伐。 : i1 F+ f) N" j. v2 s7 z& {
海洋测绘技术装备主要有:海岸地形测量∶传统测量、GNSS、RS、机载LiDAR…… 3 {5 h( j+ }7 C$ w) [- z
海底地形地貌测量:单波束、多波束、侧扫声呐……
# ` E4 z- h: V- ?5 b s7 S 海洋重力磁力测量:重力仪、磁力仪…… - b1 N- o2 c( a

0 Q/ [( J, I6 f$ U* }
无人测量船
( I( U7 ]. m# y* f6 k) _/ x& `- K# n7 R 大量的浅水区和环保要求较高的水域,有人船依然难以到达,导致了大量的水域水下数据是空白的。随着技术的发展和成熟,无人化、自动化的无人测量船应运而生,短短几年间,国内便涌现了大量的无人船相关企业。无人测量船的发展有两大基本方向,一是在有人船领域,无人船对有人船的替代,二是有人船无法到达或不能到达(如环保要求)的水域,无人船对可测量水域的扩充。在内水区域,无人测量船有小型化发展趋势,另一方面,在海洋中,为了航行的安全,无人测量船又有中大型化发展趋势。
9 @* F# q- b- I3 u+ U" i* A 
7 K) F0 f5 o$ s
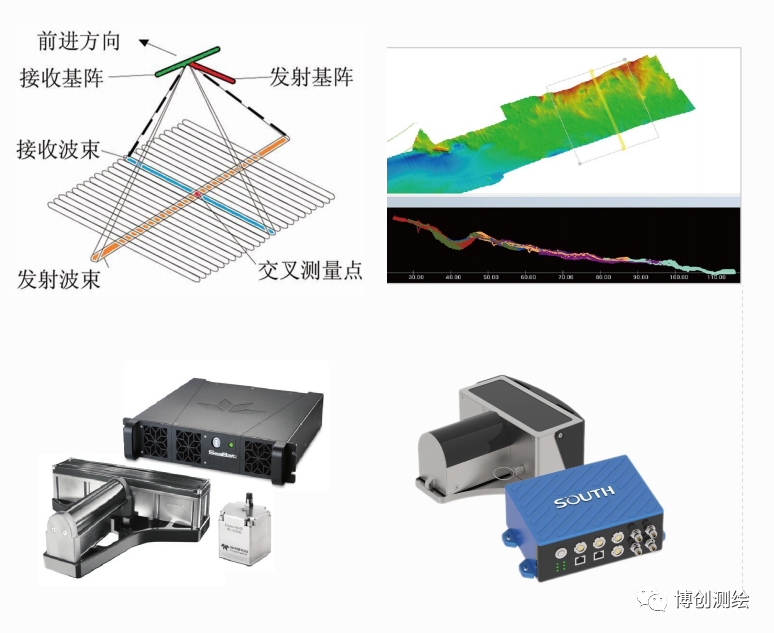
多波束测深仪
+ n) d: D/ P3 ? 多波束测深系统的工作原理是利用发射换能器阵列向海底发射宽扇区覆盖的声波,利用接收换能器阵列对声波进行窄波束接收,通过发射、接收扇区指向的正交性形成对海底地形的照射脚印,对这些脚印进行恰当的处理,一次探测就能给出与航向垂直的垂面内上百个甚至更多的海底被测点的水深值,从而能够精确、快速地测出沿航线一定宽度内水下目标的大小、形状和高低变化,比较可靠地描绘出海底地形的三维特征。与现场采集的导航定位及姿态数据相结合,绘制出高精度、高分辨率的数字成果图。 " O- m8 [2 F3 B1 f5 g! I
7 l! W* N1 W q+ g
浅地层剖面仪
d% G X% D% I 海底地层剖面测量技术是基于水声学原理来探测海底沉积特征、海底浅层结构和海底表层矿产分布的重要手段,其工作原理与以上两种相似,区别在于浅层剖面系统的发射频率较低,产生声波的电脉冲能量较大,发射声波具有较强的穿透力,能够有效地穿透海底数十米至几百米的地层。实践表明,此方法适用于探测海底地层变化的界面信息和沉积结构。其应用范围包括海洋地质研究和水上工程勘察等诸多领域。
2 N, b- b( a! i& V3 y 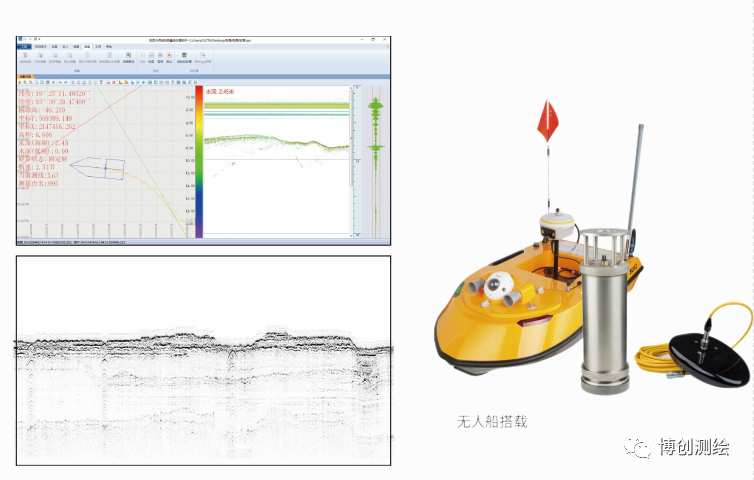
( A, R% S" B% N' K9 K1 \
, j; i) u3 w0 N- P5 Q: j$ a1 j- r
" X2 Q: T9 l% k1 X* \- H! z" A
9 h$ d3 _: C1 M5 S$ q* }' A4 w3 A0 O8 |0 [
| 

