|
0 D4 E+ O) [' _ 原创 中国测绘学会 中国测绘学会 - g% @6 ~5 `- d4 r" k% y
可快速关注我们
+ g I. Q, w# Q! B- s 本文内容摘自《中国测绘》2020年第9期
( d# @7 p+ d& Q, S* t1 b) I$ c w+ n( A' n0 Z" G
2 Z, b0 q f6 y7 A, X5 ~- Q 本文探讨了使用Apache USV系列进行有效的海底测量的各种功能。CHCNAV水文勘测软件用作数据记录和分析,其结果以地面、等高线和深度的3D模型形式提供。
" ^9 ~" x4 L$ V5 C8 G S 水深测量是对海床或湖床的研究和测绘。它包括获取海洋或湖泊深度的测量值,并且等同于绘制地球地形图。通常,关于海床和湖床的信息很少,现有的海床地图通常分辨率较低或已过时。
; `" I) S' N6 ?# F 在水坝测量中,是在施工期间对底部进行测绘。并不记录时间序列数据,因为深度将难以测量。由于水的流入,大量的淤泥会沉积在大坝中,导致蓄水量减少。在该应用中,Apache系列是合适的技术,因为它可以测量高达300米的深度并提供精确的GNSS定位。该数据可用于估算冲刷河道底部的淤泥沉积物等。 ; |' D3 K$ P# `- c! @4 G% a
必须精确测量底部高度以确定船只是否可以驶入停泊区,或者是否需要疏通以形成足够的深度。这需要用大坝和水库区的深度去计算大坝逐年的容量,因为水在水坝中不断流动,淤积导致底部高度上升,从而降低了水的总容量。 ( t" F5 o# M+ a* [+ ]/ j0 ?
阿帕奇无人水面车辆(USV)系列是独立船体,由碳纤维大分子聚酯制成。碳纤维由于其优异的特性,例如高强度和模量比、低膨胀系数和相对柔韧性而被广泛用于高级材料的制造。 6 o5 c1 Q- y- l
4 e1 `; N: ^: E) F) w/ v7 h; z' u4 Y 
. @, h, f, {$ g7 \" l
CHCNAV阿帕奇3河道测量 ! R- b) c8 t6 s, }6 m
自主性是无人驾驶海上应用的重要方面。目的是增加可以自动化的水下任务的范围和复杂性,同时减少操作员监督的需要。对于大规模和在紧迫的时间内实施无人驾驶装置而言,两个最重要的问题是系统可靠性和制造成本。与无人机领域相比,例如无人机或遥控飞行器(ROV),在海上无人飞行器领域进行的研发较少。但是,近年来,在硬件设计、系统开发、碰撞避免、轨迹规划、平台设计、控制器、建模、稳定性和能源管理等几个方面取得了显著进展。
& g0 D9 y/ K0 h. H( |* Z Apache系列具有差分GNSS,可提供厘米级的精确位置数据。流动站的GNSS安装在海上无人机上,基站安装在地面上。它配备了用于将数据传输到地面站的RF通信系统,并具有实时PTZ摄像机。
+ b7 b. y3 R5 t9 o/ m 综合水文系统 - {# I) X! @4 h3 w
Apache系列集成了无人导航和地形测量技术,提供了独立的、集成的、机动化和联网的水文解决方案。 3 W" p7 z. ^) _8 ?; X3 J
Apache USV是便携式的,即使在偏远地区也可以进行测深测量和制图、航道测量、水下地质勘探等。该系统降低了人类安全风险,并提高了水下观察和水文测量的灵活性和效率。船体采用防腐蚀密封技术,适用于不同类型的任务环境。它会根据任务计划自主航行以完成任务。
8 O$ v+ p4 w$ I1 G) ~3 \' C& p3 { 单光束和多光束回波探测器
3 W% X8 b( K- q1 A5 A1 e4 Z 回声测深仪是一种声呐,用于通过将声脉冲传输到水中来确定水深。记录脉冲的发送和返回之间的时间间隔,该时间间隔用于确定水的深度以及当时水中的声速。距离是通过将信号的输出脉冲与其返回之间的一半时间乘以水中的声速[T÷2×(每秒4700英尺或每秒1.5公里)]来进行测量。
0 S) X" @8 f# O$ ~' p, N8 {
; N+ ?2 g' J1 h/ k" {- T 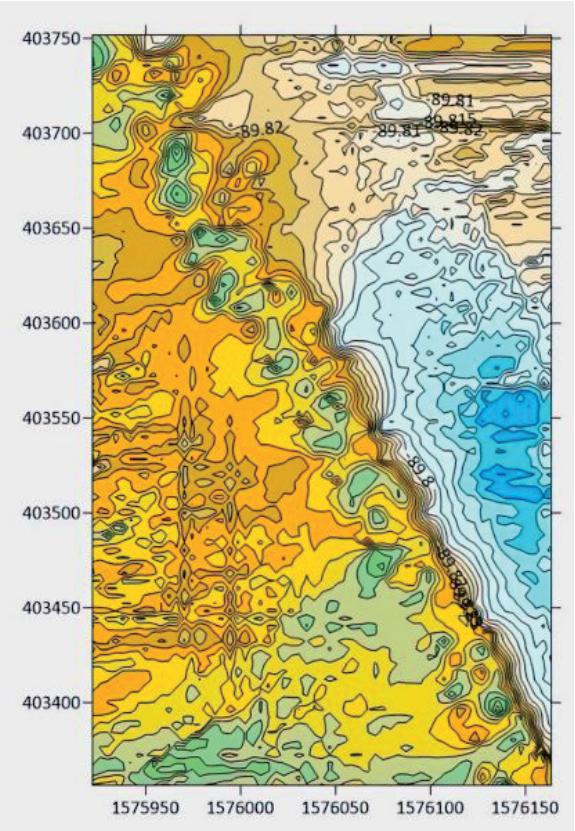
6 }% H! M8 {/ F3 O; n: C
海底等高线图
) K% s) g& g- S Apache系列装备有单波束回声测深仪,以查找深度并计算海床的高度。Apache6系列还提供了用于海洋学操作的Norbit多波束回声测深仪(MBES),不仅提供可靠的测深图,还提供海床的后向散射阻力(BS)曲线。此信息可用于各种应用程序,例如海床分割和表征以及地球物理参数的反演。
8 w9 x( {8 N2 L/ E: k4 w- n GNSS RTK+惯性定位与导航 / x7 O1 g' _! I6 Q8 Q
Apache系列集成了GNSSRTK系统,可将定位精度从几米的GNSS精度提高到大约2-3厘米。RTK使用固定地面参考站网络广播GNSS卫星系统给出的位置与已知的固定位置之间的差异。
. C- E3 |8 \7 ?% j: T% g; U f( M 简化运输,提高生产率
L2 {; V4 o+ H/ A+ k) D+ H Apache USV紧凑轻巧,便于运输。地面通信系统已安装并连接到计算机,用于从海上无人机传输数据。设置RTK基站以允许精确定位。生成具有测量范围的导航计划,并将其上载到Apache导航系统。 ) G Z# h9 z% w9 h5 y, P
一旦进行自动驾驶,Apache USV就会遵循任务计划并在预定的点采集数据,然后将其传输到地面站,并由此存储在计算机上。然后可以使用CHCNAV Hydro Survey软件处理该数据,并生成地下图、等高线图和深度图的3D模型。在港口区域,测量海床高度以确定船只可以停靠的地方以及需要疏通的地方。 # n6 f8 r7 z; a' {. \! z" W
在大坝中,可以测量床面高度用以计算大坝的容量。在雨季期间,由于大量水流进入坝区导致淤积,坝床的底部升高。这会导致大坝容量的严重变化。只要超出限制水坝运行的数量,就必须进行清淤。 7 d. d2 U% y; }# `/ ~0 f; t/ H
通用的测深解决方案
7 b0 \; w P3 k/ H) C4 J' f7 O 在以下情况下,使用无线电桥将项目上载到Apache USV,数据采集速率设置为每米一个点,GNSS设置为以1Hz输出NMEA。 & b1 h$ y* C. T E/ C& c
; t( V. z: v) z1 B0 \2 H 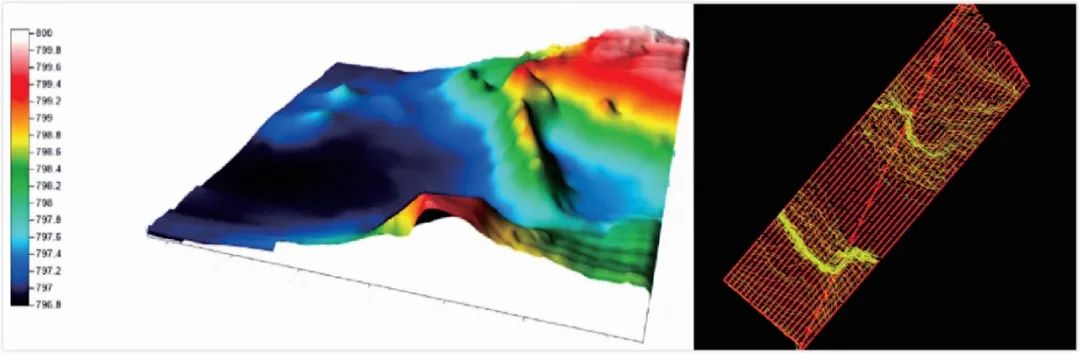
" G6 l% j" q. I1 ` E* K- I
河床横断面
5 t* G2 @3 I t 项目1:以10米的线距绘制现有港口区域中的海床。回声探测仪和GNSS接收器已连接到HydroSurvey软件。开始数据采集程序,并定义自主任务。Apache USV导航到起始位置,并开始沿预定义的路线采集点。任务完成后,它将返回其原始位置。处理后的数据可用于生成海床和等高线的3D模型。
3 X& N# i T$ h 项目2:提取河道方向的河床横截面。沿着给定的横截面手动操作Apache,以获取每隔一米的深度。使用不同横截面位置的深度生成完整的横截面。
6 Z, B; I8 C4 n, @4 a, q 项目3:绘制湖床平面图。提取处理后的数据并准备一个3D模型,该模型将用作基准参考以验证清除的淤泥量。湖泊清淤完成后,该区域将被USV重新绘制。两个数据层将用于比较和估算清除的淤泥量。 ; c- J, ?2 r& K) W+ h6 A
9 ~9 s/ y" D9 j- m 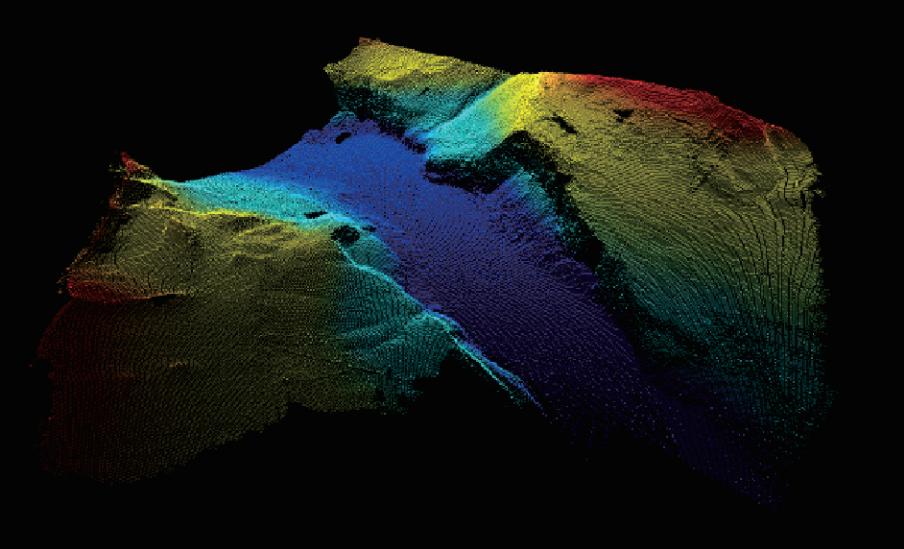
+ x8 {) v) J' y, X9 F. x% G: m1 f, C 3D模型 ; ]4 b% `! ~' N6 d3 U3 h- I& A
结论这些项目使用了各种方法来有效地绘制河床和海底高度。所提出的方法具有多种应用,例如计算大坝的容量以及清除河床和水库的淤积。使用3D地形模型、轮廓线和深度图可以准确地表达海底的深度和高度。
4 x( K, f+ v+ g 海上无人测量装置的使用使水深测量工作能够以自动化模式进行,而无需调动传统的测量船,从而提高了水深测量的生产率。它们的便携性使其可以在偏远且难以到达的位置使用。诸如Apache系列之类的嵌入在航海无人机中的技术的不断发展,加上其可承受的价格,已促使其被海洋测量专业人士采用并被广泛使用。
" R: h* v: A d& U9 y5 s6 U% s 译者:一景,荷兰对地观测公司(NEOBV)遥感地信咨询顾问。 7 [8 P7 \. ~) y% p5 L
文章来源于GlM-Intemational官网应用案例专栏8月5日报道。 9 w2 G$ {! c D8 L! r
声明:本文为《中国测绘》原创文章,授权合作请在本公众号留言,或致电:010-63881401。
0 v8 N# L* G2 F/ _; j 《中国测绘》期待您的来稿
' D# |5 n% l( i4 k& {2 E; W 《中国测绘》 6 E' S7 Z" M T" r+ B9 t- l
测绘地理信息发展变迁的 R: p8 N' `( H; m
记录者、思考者、传播者
2 {" z: _( H2 A7 m 自然资源部主管
1 i+ K8 j+ M$ q2 d( U+ l 中国测绘学会主办 , l) [5 E2 V$ C! F6 k0 Q; d
面向测绘地理信息行业的全国性综合刊物
2 O5 W0 {+ N9 i- U1 I7 q6 D 投稿信箱(只接受电子投稿): . Q9 {. n ?/ l0 V# n
letters@sino-survey.com
4 X4 K6 K+ g) k+ l. a! _ 《中国测绘》全年征订中,长按下方二维码添加关注,可在线订阅
* F8 e* Q* T- z3 B/ k 喜欢此内容的人还喜欢 - Q5 n6 P' `% Q
原标题:《用阿帕奇无人测量船技术测高》 3 A. j% ]5 V" k2 Z; @ t5 `3 X
% ?0 o) V4 h2 Z; E- h! U- S, S% N' z
3 B5 Q, `' ?, Y1 l; Y7 {: \, K
) x/ X+ q% p! l8 B$ k; F& z
" e9 d! R5 K/ Z/ m) s1 b6 {: U6 {( v
; M, j8 z, s& Z5 \% ^" \" t
2 z5 h0 b' c! N6 n9 L }2 f" w! l6 S+ U% ?% D/ }5 @* d8 u8 Z* }
| 

