|
( F9 a# _' c) f5 k
2 ^4 y& N/ u+ W ~5 E" W 资料图 - c2 ~$ b5 ?' g+ \ M( I
20 世纪 60 年代末,国外的科学家已意识到海洋污染的严重性,并着手开始开发海洋环境监测技术。
& z" U2 D" z! |/ [2 b8 V; K( r0 v8 ] 70 年代末,国际上已经进行过多项海洋污染调查和监测计划,相继研制了用于现场污染监测的温度、 盐度、 pH、 溶解氧、 浊度等传感器以及监测海洋污染其他参数 ( 如叶绿素 a、 营养盐、 放射性、 有机物、 重金属等) 的传感器、污染传感技术和污染监测技术有较大进展。 , w& U, y6 Y. b0 }0 X/ A
1971 年联合国政府间海事协商组织正式提出了 “ 全球海洋环境污染调查计划” ,将其列为 “ 国际海洋考察十年” 计划的一项重要内容。
2 f& h5 \6 N) T* a u( | 1976 年联合国教育、 科学及文化组织政府间海洋学委员会执行理事会通过了 “ 全球海洋环境污染研究综合计划” , 对基础调查、 质量平衡、 迁移过程和污染物的生物效应等调查研究都进行了原则规定,要求各成员国或区域性研究组织共同遵守,通过全球性海水、 沉积物、 生物的受污状况调查,为评价和控制海洋污染提供科学依据。 : u' @( t( O, g3 z9 M
随着海洋观测技术和电子技术、 卫星通信和微处理技术的发展和应用, 海洋环境监测技术也逐步迈入自动化监测时代。
4 O4 {0 h/ l- ?/ s( R% b ①卫星遥感
5 Q! e% V! D/ a" P5 _" \ 1978 年美国国家航空航天局成功发射第一颗海洋卫星 “ Sea Sat A” , 成为海洋观测进入空间遥感时代的主要标志及海洋环境监测进入立体监测时代的里程碑。按用途分, 海洋卫星可分为海洋水色卫星、 海洋动力环境卫星和海洋综合探测卫星,直至今日,世界各国已经发射了超过 50 颗海洋卫星 ( 石汉青和王毅2009) , 海洋卫星和卫星遥感海洋应用已成为现代海洋观测的重要手段。卫星遥感技术的应用, 使海洋自动监测系统得以连续、 长时序地发送观测资料。
v7 c, g9 ~9 T J- U! \" _+ H3 Q5 _ 此外,海洋浮标和水下移动观测平台是两种主要的海洋环境自动监测手段。
$ E- A; u+ G9 H# c- D7 C h ②海洋浮标 3 N6 k" B# ~) Q# X
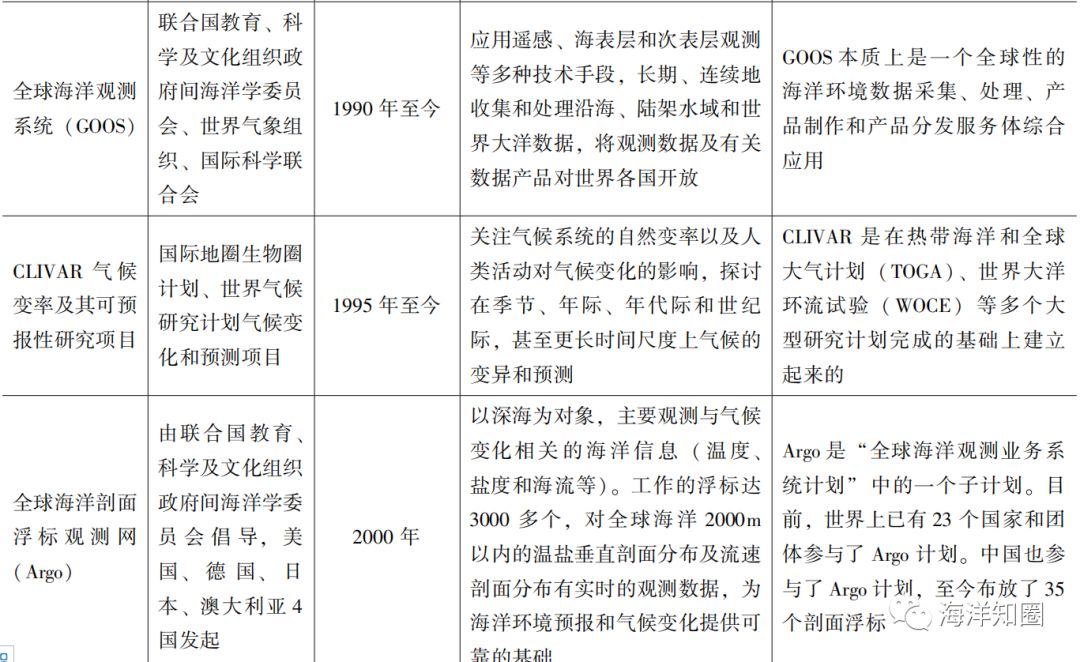
海洋浮标的研制始于 20 世纪 40 年代末 50 年代初,70 年代中期,电子技术、 卫星通信和微处理技术的发展促使海洋浮标技术进入实用阶段。海洋浮标由于受环境影响小,造价低等优点,在现代海洋环境监测中得到了广泛的应用。 例如,全球海洋剖面浮标观测网 ( Argo) 计划由美国大气、 海洋科学家于 1998 年推出, 有 23 个国家和团体共同参与,已在太平洋、 印度洋、 大西洋等海域连续投放了 3000 多个 Argo 浮标。这些浮标组成了一个全球范围的海洋环境自动观测系统,旨在快速、 准确、 大范围地收集海洋中上层水体 (2000m 水深内) 的水温、 盐度及海流资料,以提高气候预报的准确性,减少日益严重的气候灾害给人类带来的危害。
: T9 B; f* K& G0 a T \ ③水下移动观测平台
2 d2 V9 V* w, d4 m, N& d6 ^ 水下移动观测平台主要包括无人遥控潜水器 ( ROV)、 自主水下航行器 ( AUV )、 无人水下滑翔机 ( AUG) 等 ( 李颖红等 2010) 。
5 ?+ Y" q, s$ x, P# D) q& a 水下自动观测平台可以在人类无法达到的大洋深度或危险环境进行长时间的自动观测, 日本海洋科学与技术中心研制的 “ 海沟号” ( Kaiko) , 是世界上下潜深度最大的 ROV, 下潜深度可达 11 000 m我国首台自主集成研制的作业型深海载人潜水器——— “ 蛟龙” 号是目前世界上下潜能力最深的作业型载人潜水器。 2012 年 6 月 “ 蛟龙” 号 7000 米级海试最大下潜深度达 7062m。AUV 由于没有电缆的限制,可在水底进行大范围观测, 并持续更长的时间。AUG 是将浮标、 潜标与传统水下机器人技术相结合的一种新型水下机器人, 其最大优点是无外挂推进系统,能够依靠自身浮力、 波浪及海水热差驱动, 沿锯齿形航迹航行, 相对于 ROV 和 AUV,AUG 下潜深度较低,最大下潜深度一般在 2000m 以内但其制造成本低、 能源消耗少、 续航能力强、能在广阔的海域运动, 因此在现代海洋环境立体监测中被广泛应用。 美国华盛顿大学研制的 Seaglider 水下滑翔机器人能够在海中航行数千千米,连续航行 6 个月, 最大下潜深度可达 1000m ( Eriksen et al 2001) ,能够在目标位置进行垂直采样和测量ꎮ 能源和数据传输问题是海洋浮标和水下移动平台技术开发中共同面临的问题, 如对电池进行改进或寻求其他能源以提高续航能力,改进通信方式以增强通信距离及信号强度,改进内部程序以增强运行时的自主性和外界的操控性等 ( 聂炳林2005) 。 0 X3 _% _, m9 w- L2 w: }2 `
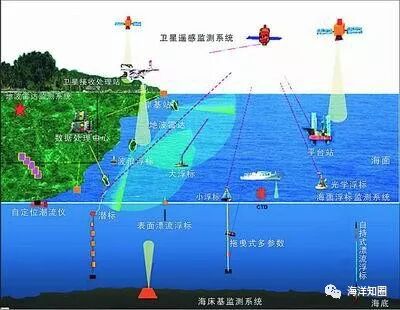
海洋环境监测污染监测的自动化技术至今已发展到较高水平, 现场污染监测技术已经进入实用阶段。 例如,美、 日、 德、 法等国家的综合水质仪、 水质自动监测浮标、 海上油污监视监测系统等, 海洋环境监测技术不仅在监测项目和监测技术上不断提高,更逐渐形成了以传感器技术,高可靠、 多功能、 全自动的数据采集控制单元,功能很强的软件包,系统可靠性设计技术, 系统抗干扰技术及水下仪器的防护技术等为一体的自动监测系统,实现了高效、 快捷的在线自动监测。 先进的在线自动监测技术能够快速高效地提供大量海洋物理、 化学数据,为治理海洋污染和发展海洋技术提供数据支持。 目前,各沿海国家都在积极发展现代海洋监测高新技术, 形成了以遥感卫星组成的天基海洋环境监测平台, 以海洋巡航飞机,有人、 无人航空遥感飞机组成的空基海洋环境监测平台, 以固定海洋环境监测站和高频地波雷达站组成的岸基海洋环境监测平台, 以浮标、 潜标、 漂流浮标、 水下移动潜器、 船舶等组成的海基海洋环境监测平台, 以水下固定监测站、 水下水声探测阵等组成的海底基海洋环境监测平台等构成的多平台长时序的海洋环境立体监测系统 ( 罗续业等 2006) 表 1—4 为海洋环境监测发展的总结。
1 Q; h% {/ }5 ` 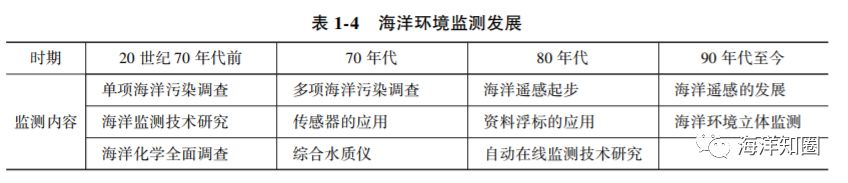
" Y: H7 Y) @# z' T5 _6 j- V
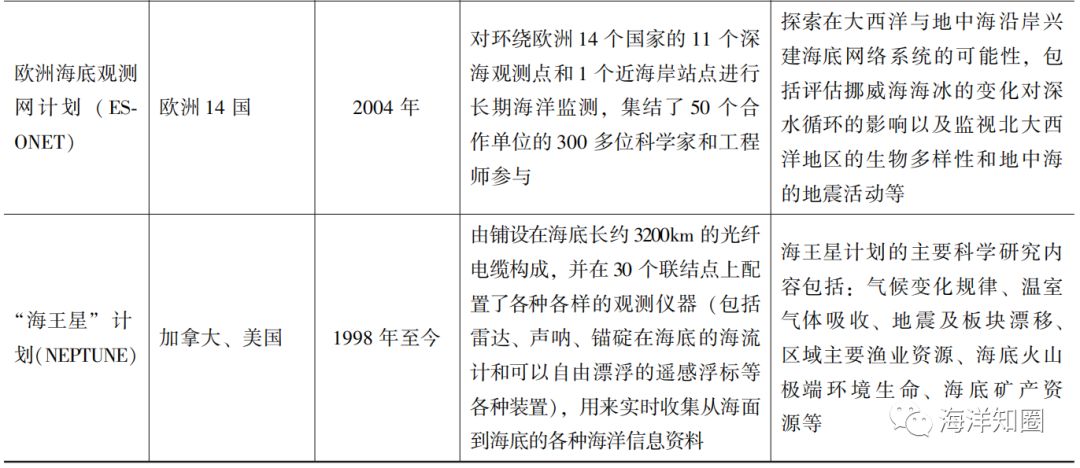
海洋环境立体监测从 20 世纪 80 年代后期发展至今, 已经形成了多个覆盖全球或部分区域的海洋观测、 监测系统和研究计划, 表 1 ̄ 5 所示为全球范围的海洋环境 ( 科学) 观( 监) 测计划及有代表性的区域海洋环境监测计划简介 ( 部分引自李颖红等 2010) ,覆盖全球范围的海洋环境、 气候及其他环境因子的观测计划为各国、 各科研组织之间的信息交流和资料共享提供了良好的平台, 对海洋大环境及全球气候变化的研究具有重要意义。例如,全球海洋观测系统 ( GOOS) 是全球范围的大尺度、长时间的海洋环境观测系统,其于 1990 年由联合国教育、 科学及文化组织政府间海洋学委员会、 世界气象组织、 国际科学联合会理事会和联合国环境规划署共同发起, GOOS 由气候模块、 海洋健康模块、 生物资源模块、 沿岸模块和服务模块五大部分组成,综合运用卫星遥感、 地波雷达、 飞机遥感、 浮标潜标、 水下移动监测平台、 船舶监测、 岸站监测等监测手段, 形成了覆盖全球的海洋环境立体监测网络, 其主要监测内容包括海平面变化、洋流的地点和强度, 异常高浪的发生海冰的范围,有害海藻的发生,干旱地区雨量预测,鱼类越冬期长度和寒冷状况, 疾病暴发的可能性等。 其所监测到的海洋资料和信息可全球共享,对于海洋大尺度环境变化和中小国家对海洋的研究和开发具有重要意义。
+ a8 j1 m1 @5 y; V) Q: Q. K0 L 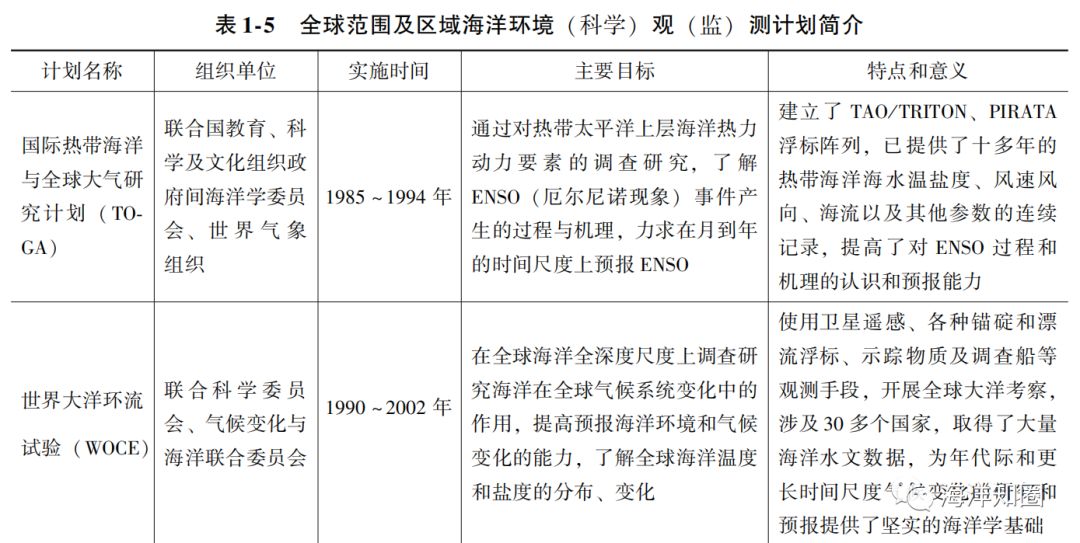
4 ]- N3 H; e* V" @* v! Z, J% R
N, V0 c6 o! E! x 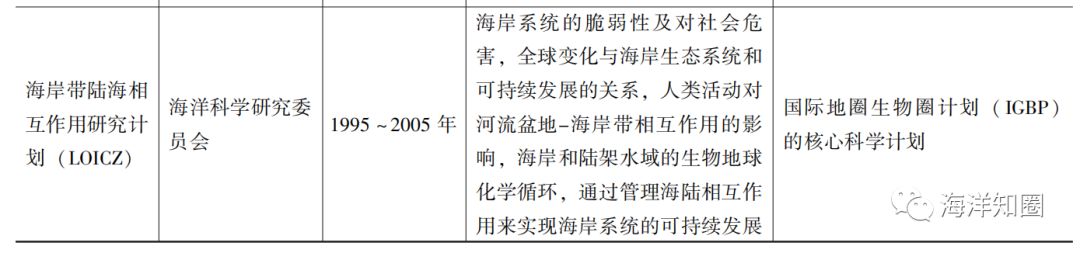
. v" L' J+ `5 N 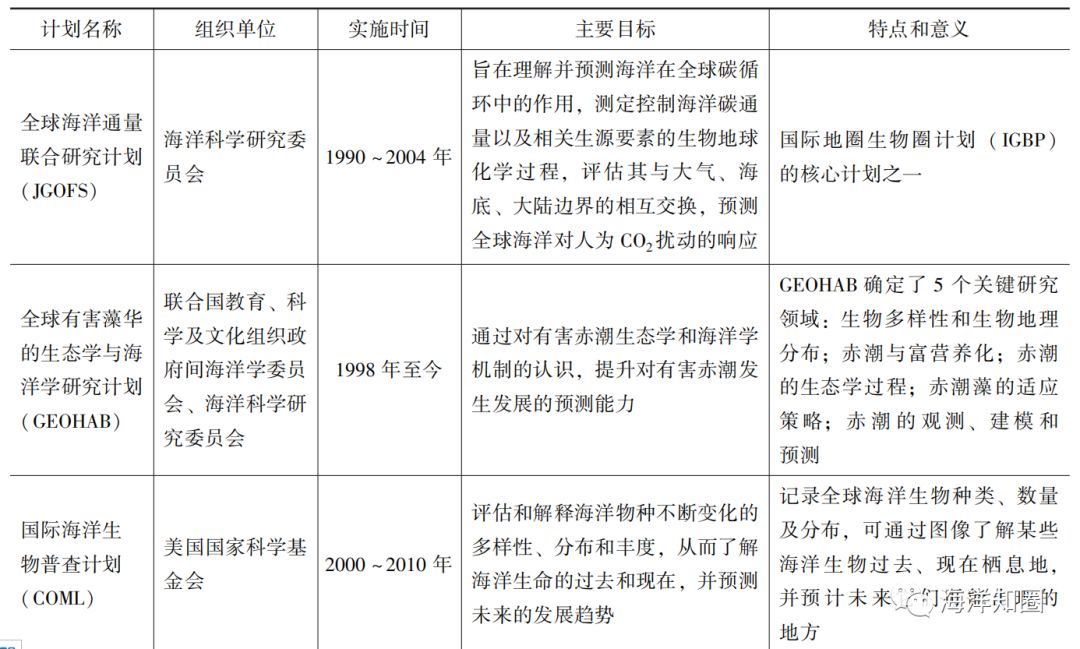
% F: h+ e, i6 R7 P& b$ ? 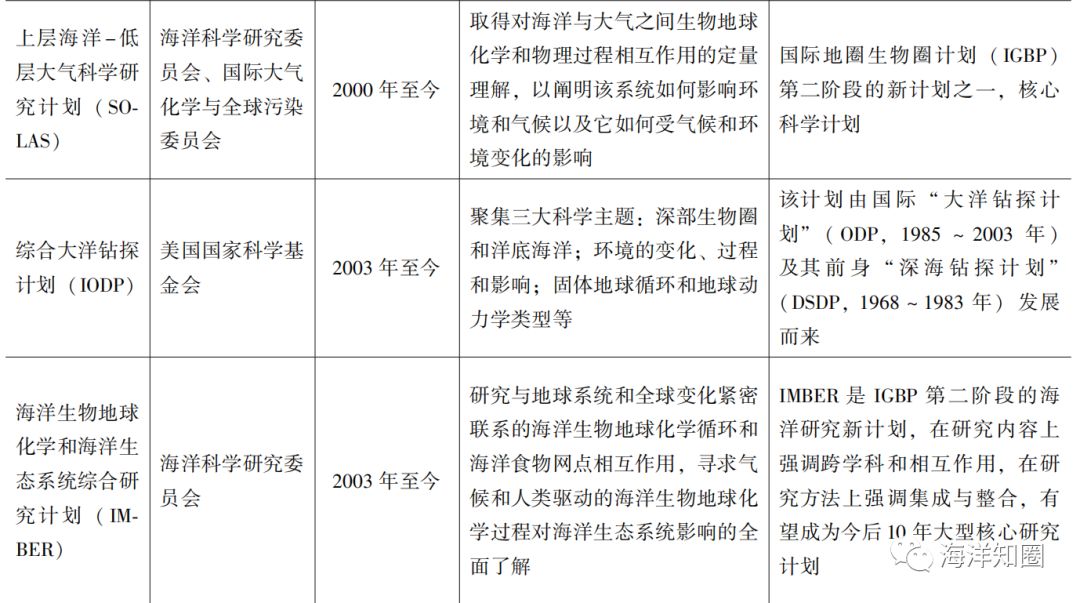
' Y7 W9 D' j3 x( b! ~ 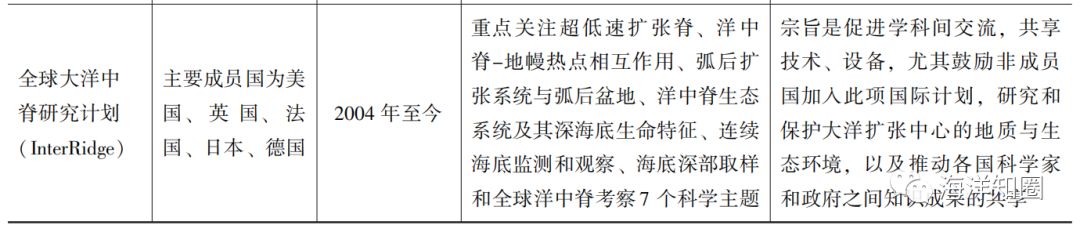
6 a/ s, f* ], W. U3 }5 p 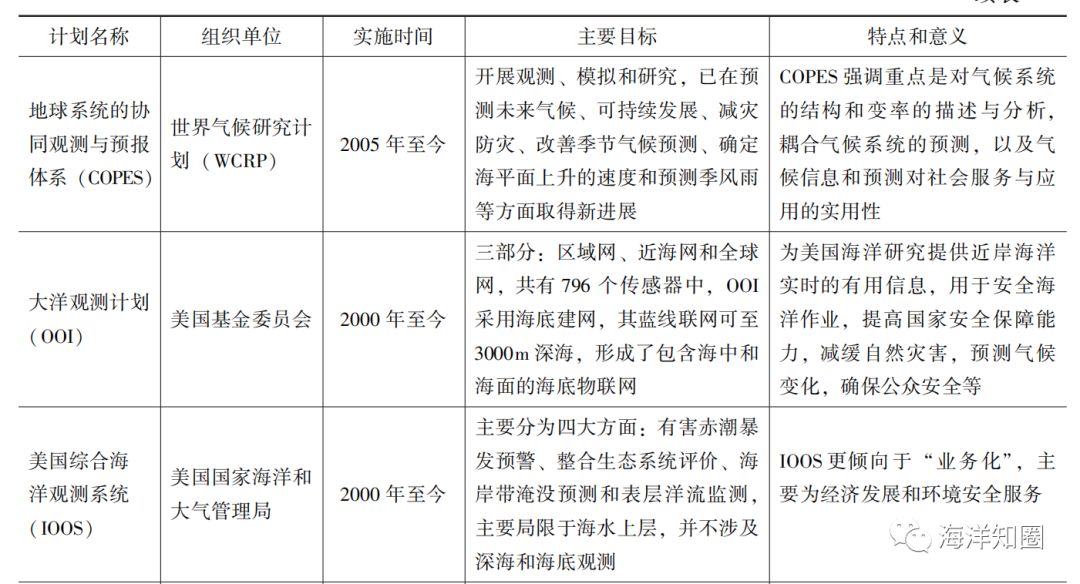
* w! X/ t, ~' H }4 Y3 H
$ W* B( ^* J( \" `
本文摘编自《海洋环境分析监测技术》(陈令新等编著. 北京:科学出版社,2018. 5)一书“第14章 海洋环境分析监测展望与挑战”,有删减,标题为编者所加。
$ V6 b8 \7 S; V% D$ |$ o4 M4 \, T) M 
, H! D! ~+ t1 u8 y. G% P 可长按上方二维码
. A( J9 H! Y* f) Z, e ISBN 978-7-03-054684-5 - H5 o# p v+ A
责任编辑:周 杰
; p$ U# d J! \0 m5 C8 l  6 ~7 R: t6 `6 H% {7 d, r

 fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E) —END— —END—转载请留言申请白名单。
8 A: S" t3 s" L8 A/ \" q1 G 2018第十届中国(海南)国际海洋产业博览会(2018年9月28日-30日)
) X7 X8 ?3 M9 N7 S( o" W! ^# Z; r 海洋基础科学问题研究主要聚焦在?海洋科学的研究对象、知识体系、二级学科有哪些?| 《10000个科学难题(海洋卷)》全网独家首发
, S% }- A# W+ K
# @6 H6 Y8 V; l; ^, i; r
海洋知圈 5 y9 A0 W% g# {& S+ q. Z
知晓海洋 | 探知海洋 宣传海洋 | 服务海洋
0 r: C9 w. U( M# z; G6 ~6 |
& u H4 `+ O' ~% {) s+ @
* p T+ }' c9 L1 o9 _
' j& a" c7 v6 l
2 t$ C/ B2 \: M- b* [( n5 c
- _4 ~3 `; Q9 [8 D1 Q4 n' ~- x. b* l | 

